全自动驾驶有几种技术路线,优缺点和成本对比(买车/投资都适合看)
全自动驾驶(通常指L4至L5级高级智能驾驶)在行业内的竞争主要集中在环境感知(硬件方案)与算法架构(软件方案)两个维度。 目前主流的技术路线主要分为两大硬件感知派系与两大软件算法派系。 一、
来源声明:本文由 @LMDFinance 首发于 X,本站转载仅供学习交流,不构成投资建议。

全自动驾驶(通常指L4至L5级高级智能驾驶)在行业内的竞争主要集中在环境感知(硬件方案)与算法架构(软件方案)两个维度。
目前主流的技术路线主要分为两大硬件感知派系与两大软件算法派系。
一、 环境感知维度:纯视觉 vs. 多模态融合
在硬件和传感器层面,行业主要分为以特斯拉为代表的“纯视觉方案”和以华为、Waymo为代表的“多模态融合方案”。
1. 纯视觉方案 (Pure Vision)
核心硬件:全车仅依赖高清摄像头作为唯一的感知输入,完全不配备激光雷达。
技术逻辑:模拟人类双眼,通过摄像头捕捉图像,利用深度神经网络在三维空间中重建周围环境。
代表车企:特斯拉 (FSD)、极越汽车。

附注:
一辆自动驾驶汽车通常需要配置 8 到 12 颗 摄像头。
一颗车载摄像头的价格通常在 150 元到 600 元 人民币之间。
普通摄像头(用于环视、倒车):约 150 - 200 元。
高像素摄像头(如 800 万像素,用于前视远距离探测):约 400 - 600 元。
2. 多模态融合方案 (Multi-Modal Fusion)
核心硬件:激光雷达 (LiDAR) + 毫米波雷达 + 高清摄像头 + 超声波雷达。
技术逻辑:各传感器各司其职。激光雷达通过主动发射光束,在各种天气下提供高精度的物理“测距底线”,与摄像头互为冗余备份。
代表车企:华为 (乾崑智驾)、谷歌 Waymo、小鹏汽车。

附注:
一辆自动驾驶汽车通常配置 1 到 3 颗 激光雷达。(部分追求极端安全或极客定位的车型可能会配置 4 到 5 颗)。
目前一颗车载激光雷达的价格通常在 1400 元到 3000 元 人民币之间。
随着芯片集成化和规模化量产,激光雷达的价格近年来大幅下降:
前向主激光雷达(性能高、看得远):约 1500 - 3000 元。
侧向/后向补盲雷达(距离较短):部分入门级或短距补盲雷达已下探至 1000 元甚至更低。
🥊 优缺点及硬件成本对比
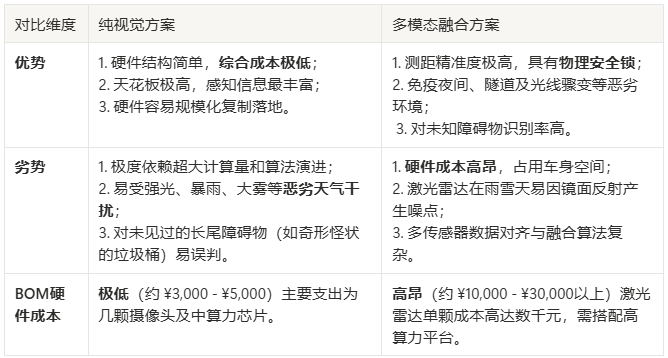
二、 算法架构维度:模块化 vs. 端到端
在软件和决策规划层面,行业正经历从传统的“模块化”向全网“端到端”世界模型的代际转变。
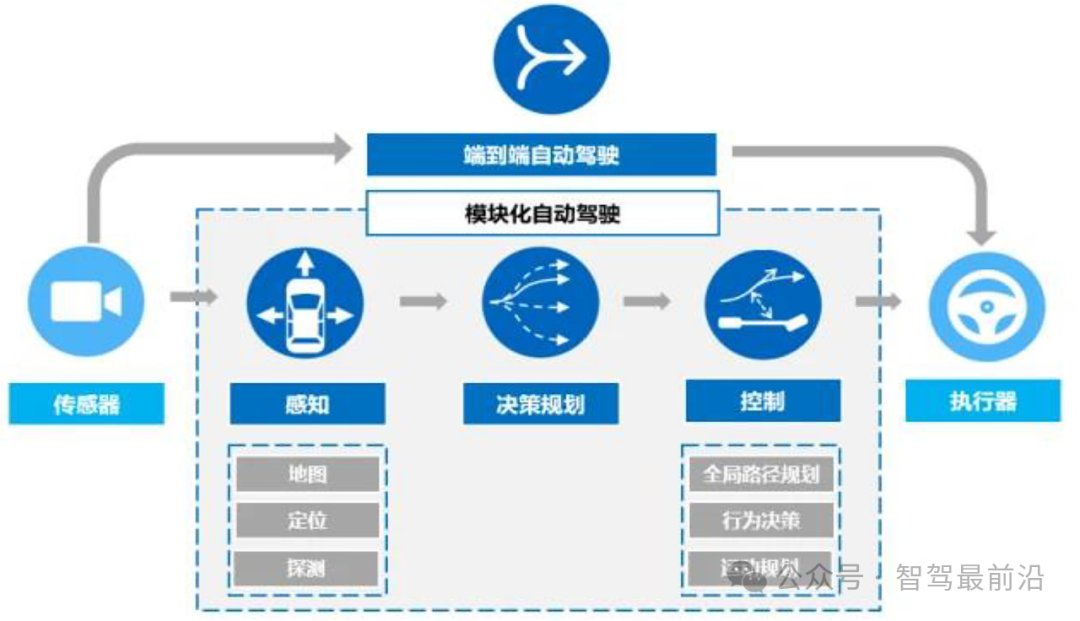
1. 规则/模块化路线 (Modular Pipeline)
1)技术逻辑:将智驾系统拆分为感知、预测、规划、控制四个独立箱体。每个环节由工程师用人工代码(If-Else 规则)编写。
2)优缺点:
优点:可解释性极强,哪里出错就能精准修改哪里的代码,安全可控。
缺点:无法涵盖所有长尾场景(Corner Cases)。代码量动辄数百万行,系统容易出现代码冲突和死机。
3)软件研发成本:中等。前期需要大量研发工程师编写规则,但对算力中心和训练数据的消耗相对固定。
2. 端到端/世界模型路线 (End-to-End / World Model)

1)技术逻辑:信息“感知输入”直接对齐“控制输出(方向盘、电门)”,中间由一个巨大的神经网络模型直接消化。
端到端技术通过将原始传感器数据直接输入单一神经网络,并在网络中经过多层的特征提取和信息融合,最终输出车辆的控制指令。
端到端方案依托深度学习算法实现输入到输出端的整体映射,从根本上打破了以往人工规则定义的局限。
端到端自动驾驶技术的发展可追溯到2016年,当时英伟达通过DAVE-2系统首次将摄像头图像直接映射为转向指令,开启了自动驾驶从模块化向端到端转变的探索历程。
随后,随着深度神经网络技术的日趋成熟及GPU计算能力的大幅提升,端到端技术在多个方面获得了突破,从早期的行为克隆到后来与强化学习的结合应用,端到端系统不仅可以借鉴专家行为进行策略学习,更能在大量“试错”过程中优化决策逻辑。
针对系统泛化能力不足的问题,还通过聚合在线数据及模拟真实场景的合成数据,提高了模型对长尾驾驶场景的适应能力,从而在实际应用中不断突破技术瓶颈与安全性能的限制。
2)优缺点:
优点:驾驶行为极度拟人化,拟真度高,丝滑如老司机;上限极高。数据处理上的无缝衔接、信息传递时的低损耗以及整个系统在目标任务下的统一优化,能够更高效地学习和适应各种复杂驾驶场景。这种基于数据驱动的深度学习方法不仅降低了大量人工设计规则的成本,还通过共享的骨干网络,显著提高了系统的迭代效率与维持成本的降低。
缺点:属于“黑盒”模型,无法人工干预单一行为;对数据量、算力中心要求堪称吞金兽。
3)软件研发成本:极高(无底洞)。虽然省去了编写规则的人工,但需要购买数万卡级别的智驾算力集群(如 Nvidia H100/B200),每年算力芯片电费及千亿量级高价值数据的清洗费用高达数十亿。
三、 模块化+端到端双系统
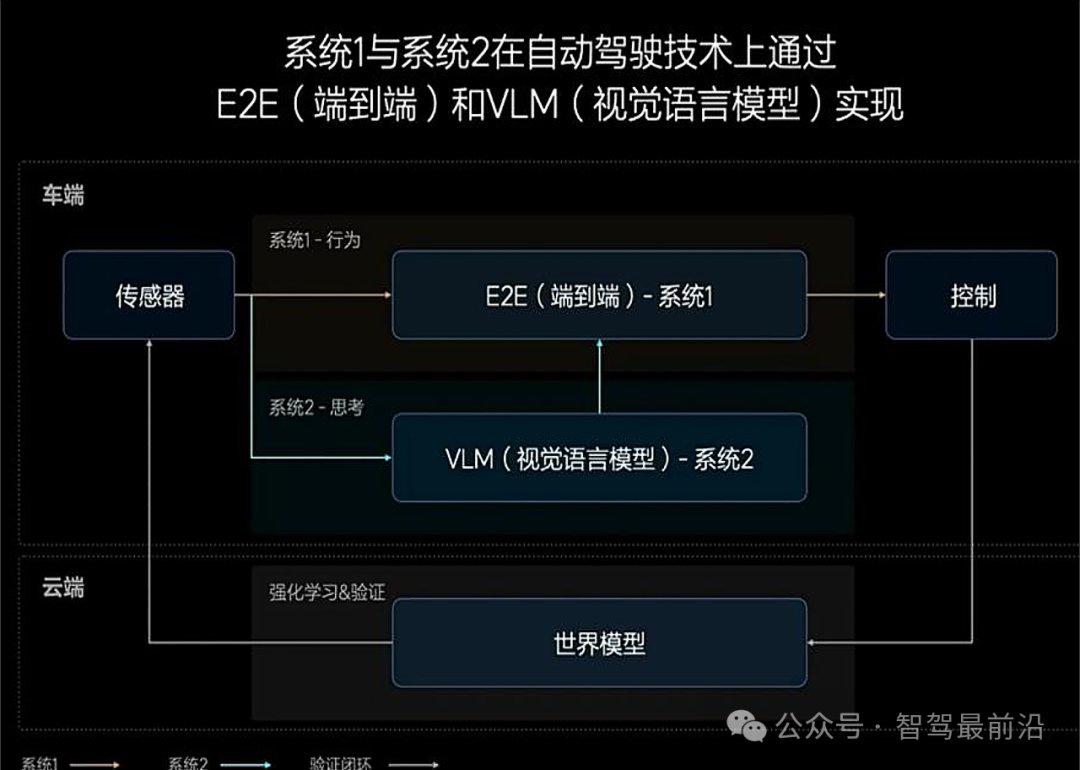
理想汽车则以双系统并行模式为特色,利用视觉语言模型(VLM)辅助端到端模型进行规范控制,将传感器数据直接映射为驾驶轨迹的同时,通过并行运行的VLM系统对复杂场景进行深度分析与推理。
这种“快—慢系统”协同的架构不仅在大部分场景下依赖于高效的端到端直觉反应,在遇到极端或复杂场景时还可调用VLM进行有意识的决策辅助,从而有效提升了系统的安全性与鲁棒性。
理想汽车这种基于双系统并行的创新思路,既保留了端到端系统高效实时的特点,又通过VLM的逻辑推理能力针对特定复杂场景进行深度优化,形成了一个从感知到规划、由快速反应到深度思考相互补充的闭环式智能驾驶决策体系。
四、 总结:你该如何选择?
端到端自动驾驶技术正处于从早期试验阶段向大规模商用过渡的关键时期。
随着政策的支持和市场竞争的不断加剧,各主要车企已经开始借助先进的AI大模型和知识蒸馏技术,推动端到端模型在车载应用中的普及与成熟。
从高阶自动驾驶测试数据积累、车端与云端技术协同,到基于深度学习的场景识别和融合感知,各项技术指标均显示出端到端自动驾驶系统正稳步向着更高的精度、更强的鲁棒性和更高的安全性发展。
随着各大车企在10万元级别车型上逐步推广高阶NOA(自动导航辅助驾驶)和L2+级别自动驾驶系统,智能驾驶技术正从高端豪华车的专属配置向主流市场延伸,实现了从“智驾平权”到全场景商用的跨越。
目前市场已经形成了非常清晰的阶梯分化:
高端豪华市场(25万以上):普遍采用“多模态融合 + 端到端世界模型”。消费者愿意为高昂的激光雷达硬件买单,以换取恶劣天气下的绝对安全兜底。
中端走量市场(15-25万):“纯视觉方案”正在凭借极致的成本优势快速普及。它能让普通的家用车型不加价也能享受到媲美百万豪车的L4级智驾体验。
风险提示: 股市有风险,入市需谨慎。以上分析仅为个人见解,不构成投资建议和入市依据。
若您觉得内容有帮助,建议收藏备用。您的收藏也是对我做内容的最大鼓励和支持,谢谢!
评论
请 登录 或 注册 后参与评论。