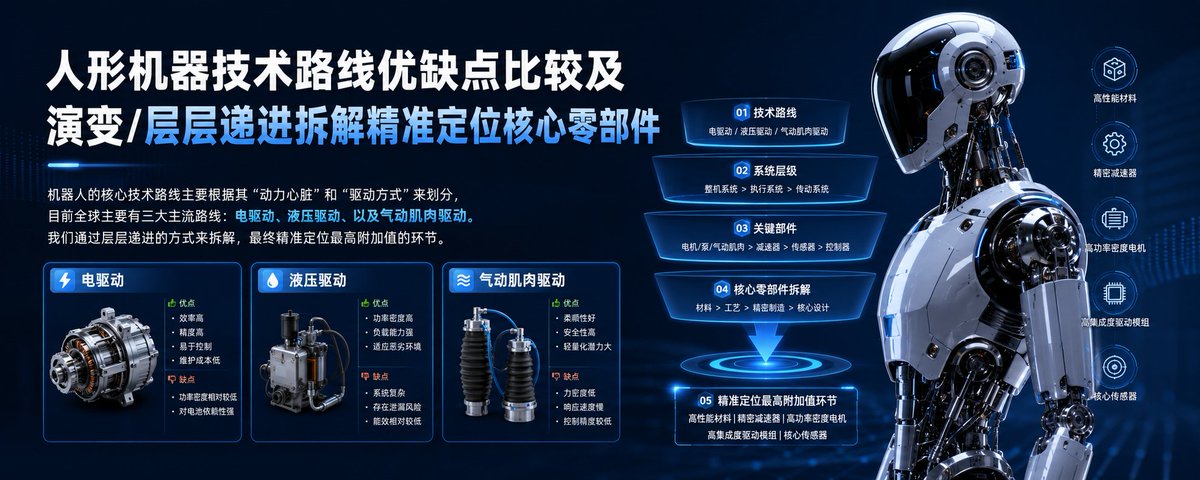
人形机器人技术路线优缺点比较及演变/层层递进拆解/精准定位核心零部件
机器人的核心技术路线主要根据其“动力心脏”和“驱动方式”来划分,目前全球主要有三大主流路线:电驱动、液压驱动、以及气动肌肉驱动。我们通过层层递进的方式来拆解,最终精准定位最高附加值的环节。
来源声明:本文由 @LMDFinance 首发于 X,本站转载仅供学习交流,不构成投资建议。
机器人的核心技术路线主要根据其“动力心脏”和“驱动方式”来划分,目前全球主要有三大主流路线:电驱动、液压驱动、以及气动肌肉驱动。我们通过层层递进的方式来拆解,最终精准定位最高附加值的环节。
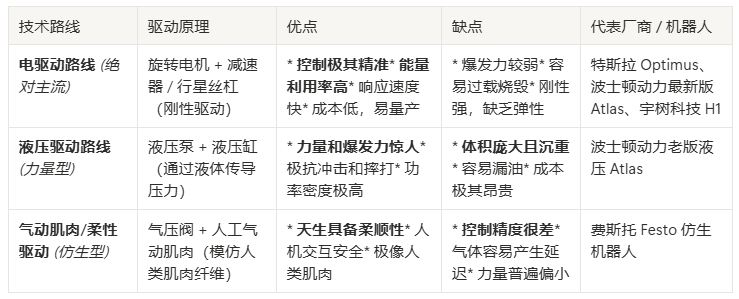
一、三大技术路线及优缺点对比
二、2026年最新行业趋势:电驱动与 AI 具身智能双向奔赴
当前,电驱动路线已经基本统治了商业化市场,连曾经坚持液压路线的波士顿动力也在最新一代的 Atlas 中全面倒向了电驱动。主要原因如下:
硬件层面:特斯拉引领供应链降本。特斯拉等厂商大力研发线性执行器(丝杠)和旋转执行器。这让电驱动机器人的零部件可以大规模量产,成本从几十万美元迅速打到几万美元以内。
软件层面:AI 大模型的完美适配。电驱动机器人的传感器和电信号最容易被 AI“大脑”(如神经网络、大语言模型)理解和控制,非常有利于实现具身智能(Embodied AI)。
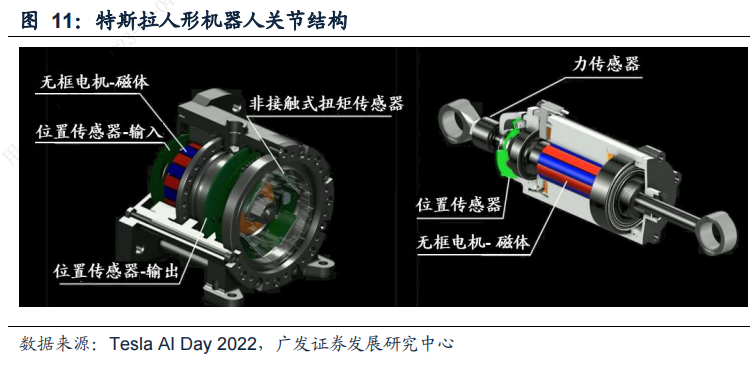
当前,电驱模式主流方案为电驱动一体化关节,主要由无框力矩电机、减速器、伺服驱动器及高精度编码器四大部分高度集成。它正全面替代传统的液压驱动,以满足人形机器人对高功率密度、快速响应及轻量化的苛刻要求。
三、精准追踪定位核心硬件
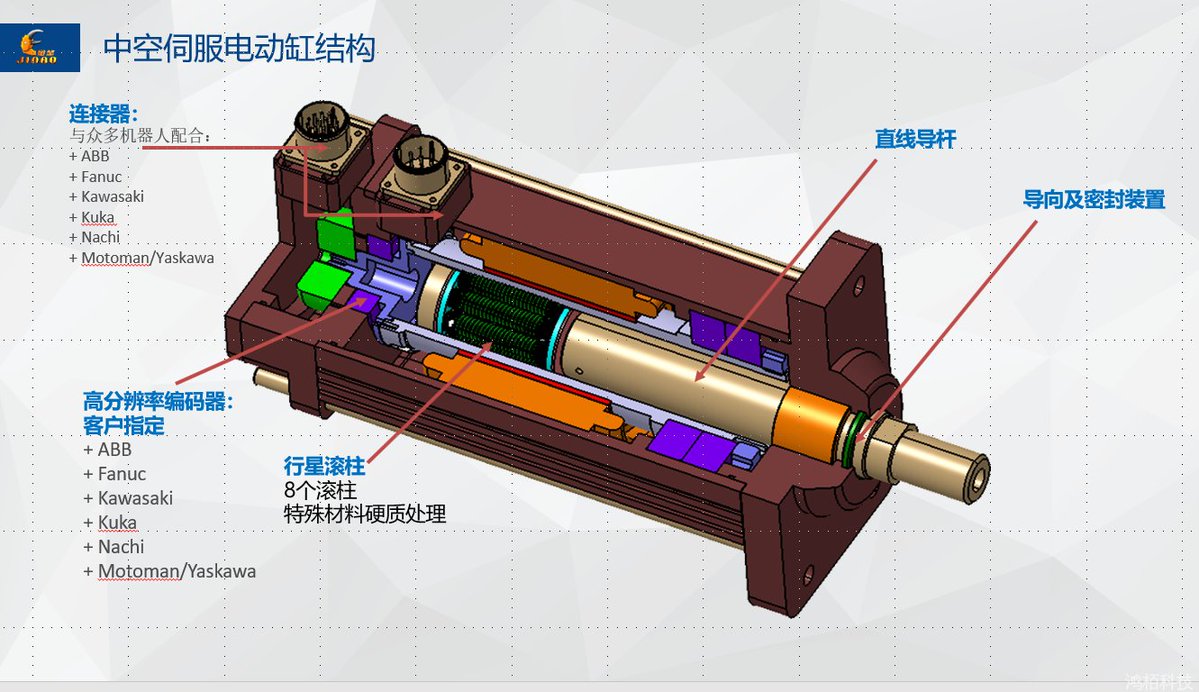
我们先用更上一层的视觉来逐渐拆解:人形机器人硬件核心:线性驱动器。这部分技术含量和价值密度最高,其核心部件主要由以下五个部分组成:
动力源(无框力矩电机):提供旋转动力的特种电机。它没有外壳,能直接塞进驱动器内部,体积小但力气极大。
传动核心(行星滚柱丝杠 / 滚珠丝杠):把电机的旋转运动变成直线推拉运动的最关键部件。人形机器人一般用行星滚柱丝杠,它像一圈小齿轮围着主轴转,特别耐扛、耐冲击、寿命长。
眼睛(编码器):用来精准测量位置的传感器。它能告诉机器人腿部伸长了多少厘米,决定了走路的精准度。
皮肤(力矩 / 压力传感器):用来感知力量的传感器。机器人踩到石头或者碰到东西时,它能立刻感应到并调节力气。
骨架(轴承与外壳):用来支撑和连接所有部件的机械结构。
其中,行星滚柱丝杠是这里面技术难度最高、最贵的零部件。
1.电驱模式的动力核心:三大电机
线性驱动器的电驱动部分,主要靠的是不同种类的的电动机来支撑:
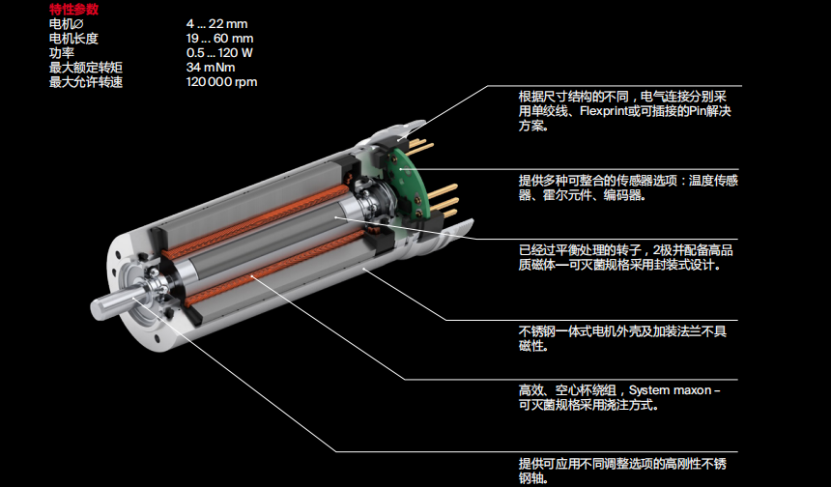
1)无框力矩电机(Frameless Torque Motor):用于机器人的大关节(如肩膀、膝盖、大腿)。它没有外壳,能直接嵌入关节内部,作为“肌肉”,提供高瞬时扭矩,具有高过载能力。它的特点是体积小,能在慢速运转时输出极大的力气(大扭矩)。
无框力矩电机是力矩电机的一种变体,保留了传统电机中用于产生扭矩和速度的部分,但没有轴、轴承、外壳或端盖。
无框力矩电机的分类在控制电机之中,主要应用于控制系统中作为控制转速、位置等的执行机构。
力矩电机相比其他控制电机的特性及优势在于:低转 速、大扭矩,同时输出稳定。无框力矩电机相比于有框架电机的特性 及优势在于:小体积、轻重量,同时提高性能。
结合上述特性及优势, 无框力矩电机能够在满足人形机器人尺寸和重量要求,同时实现高功率和高转矩密度。
力矩电机行业市场规模不大,增长速度相对平稳,业界预计未来人形机器人行业的蓬勃发展将带动无框力矩电机产品的快速增长。计到 2027 年人形机器人用无框力矩电机市场空间超百亿。
国外龙头深耕数十年,国内厂商产品正在追赶。
2)空心杯电机:用于机器人的灵巧手。它的转子像一个空心杯子,重量极轻,反应速度飞快,能让机器人的手指实现拿针、握笔等精细动作。
3)电动缸:用于需要直线推拉的部位(如腿部主干、部分躯干)。它把电机的旋转运动变成直线运动,力气大、控得准。
2.电驱模式的传动核心:减速器
减速器用于降低转速、增大输出扭矩。
1)谐波减速器或RV减速器(旋转关节多采用)

2)行星滚柱丝杠(直线关节则大量使用)。

四、驱动模式:三大关节形态
按照电机和减速器的连接方式,电驱动分为三种模式:
刚性驱动:电机通过减速器直接带动关节。它的定位非常精准,是目前最常用的方式。
弹性驱动:在电机和关节之间加了弹簧。它能像人类肌肉一样吸收冲击力,走起路来更安全、更自然。
准直驱驱动:使用能放大力量的大电机,搭配很小的减速器。它的力量很大,而且可以被外力推动(可逆驱动),互动时不容易伤到人。
- 按照电机的驱动模式,也可以分为三类:
旋转关节:主要用于手臂、腰部和腿部的摆动,普遍采用无框电机 + 谐波减速器的组合。
直线关节(滚柱丝杠):主要用于腿部膝关节等需要承受巨大载荷、高刚度的核心受力部位。
准直驱(Quasi-Direct Drive):介于传统高减速比与直接驱动之间,通过降低减速比换取更高的带宽和更好的力控柔顺性,常用于高动态奔跑、跳跃场景。
五、技术趋势:高度集成与新材料
电驱动一体化关节:不再把电机、减速器、驱动板分开装。而是把它们“多合一”塞进一个紧凑的盒子里,形成了标准化、即插即用的电驱动模块。通过一体化设计减轻整体自重,提升各关节功率密度。
轴向磁通电机:一种新型电机,形状像一个扁平的圆盘。它非常适合人形机器人对“身形薄、力气大”的极限要求。
高爆发与耐冲击:在不损坏电机的前提下,要求关节能在瞬间爆发出数倍的额定扭矩以应对复杂路况。
GaN(氮化镓)技术:电机的控制板开始采用高频的氮化镓芯片。这让电源管理和驱动系统的体积缩得更小,发热更少,效率更高。
成本控制:当前高性能电驱系统占整机成本比重极高,国产供应链正加速通过技术创新降低单关节制造成本。
风险提示: 股市有风险,入市需谨慎。以上分析仅为个人见解,不构成投资建议和入市依据。
若您觉得内容有帮助,建议收藏备用。您的收藏也是对我做内容的最大鼓励和支持,谢谢!
评论
请 登录 或 注册 后参与评论。